轴向磁通电机采用扁平化设计,结构紧凑,尤其适合空间受限的机器人关节。其独特布局能在小体积内实现高扭矩输出,轻松应对高负载需求,例如工业机械臂的承重关节或人形机器人的下肢驱动。
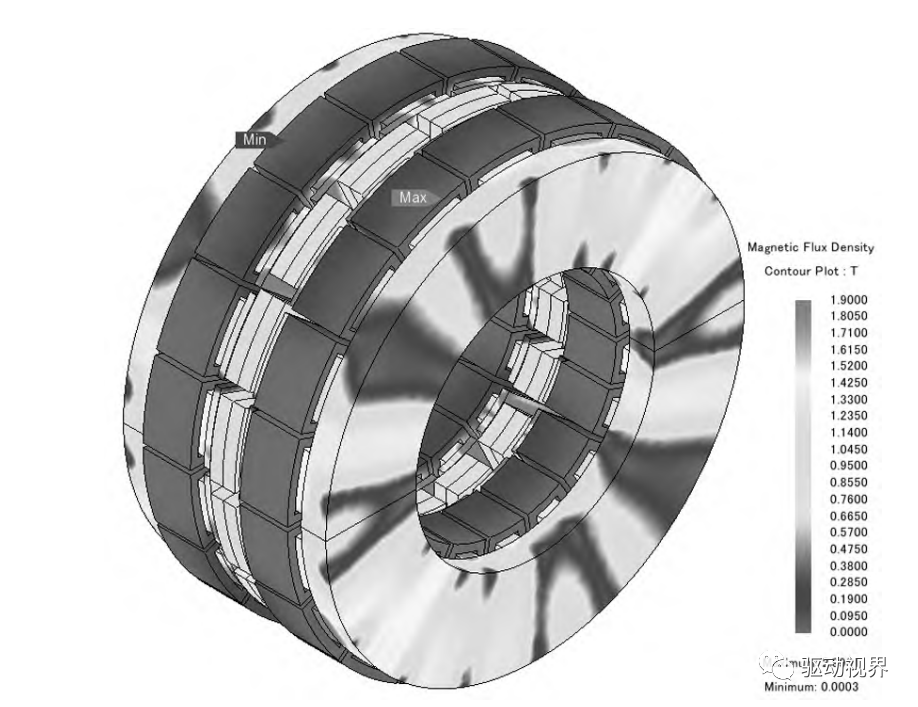
磁通路径沿轴向流动的设计大幅缩短了磁路,有效降低能量损耗。此外,扁平结构天然具备优异的散热性能,即使长时间运行也能保持稳定,显著提升整体能效。
得益于转子质量轻、转动惯量低的特性,轴向磁通电机能够快速响应指令,毫秒级的动作切换使其成为需要高速运动的关节(如协作机器人手腕)的绝佳选择。同时,其高控制精度可确保机器人动作的准确性,避免误差累积。
紧凑的设计不仅节省材料,还大幅降低电机重量。轻量化特性尤其适用于移动机器人或需频繁搬运的协作机器人,既能提升续航能力,又能增强操作的灵活性。
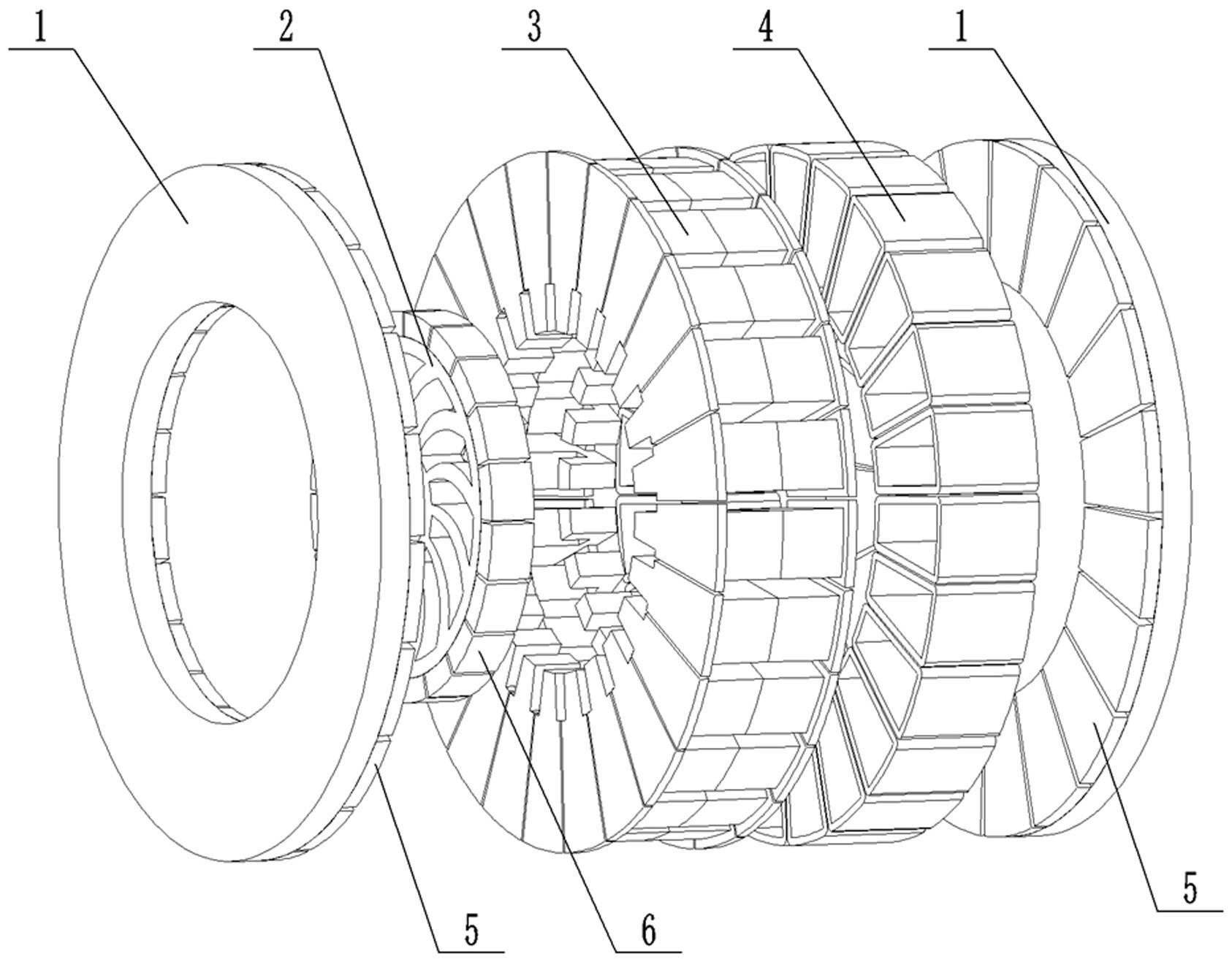
轴向磁通电机支持尺寸、形状的灵活调整,可适配不同关节的特殊需求。此外,其模块化设计便于与减速器、编码器等部件集成,简化系统架构并缩短开发周期。
优化的磁通路径和结构设计显著减少了振动和噪音,使其适用于医疗机器人、服务机器人等对静音要求苛刻的场景。
精简的机械结构减少了潜在故障点,配合低损耗和高效散热,大幅延长了电机的使用寿命。对于需要长期稳定运行的工业机器人而言,这一特性至关重要。

空间占用:轴向设计更扁平,适合狭小空间;径向电机体积较大。
效率:轴向磁通路径短,能耗更低;径向电机磁路较长,损耗更高。
应用场景:轴向电机在高扭矩、轻量化场景中优势明显;径向电机更适用于标准化工业环境。
随着机器人技术向更轻、更快、更智能的方向发展,轴向磁通电机在柔性关节、外骨骼、精密手术机器人等领域的应用潜力将进一步释放。其设计灵活性和性能优势将持续推动机器人行业的创新,成为下一代智能驱动的核心组件。
结语
从工业机械臂到人形机器人,轴向磁通电机正在重新定义关节驱动的可能性。如果您正在寻求高效、可靠且轻量化的电机解决方案,不妨将目光投向这一前沿技术——它或许正是解锁机器人性能瓶颈的关键。
(文中提及的技术参数和应用场景仅供参考,具体设计需结合实际需求进行工程验证。)